
前回

前回はLEDマトリクスディスプレイを回転させて立方体を表示しましたが、今回はハードウェアをより改善していこうと思います。
使用部品
・Teensy4.1マイコン
https://www.switch-science.com/products/6377
高性能CPU・高速IO操作・高速SDカード読み書きができるマイコンです。
・Roller485ユニット
https://www.switch-science.com/products/9924
静かでブレが少なく、回転数制御、スリップリングによる電力・信号伝達ができるモーターユニットです。
・64×64 LEDマトリクスディスプレイ
https://ja.aliexpress.com/item/1005001950053920.html
前回と同じ、2mmピッチ・HUB75e通信対応のディスプレイです。
・M5 Core Basic
https://www.switch-science.com/products/9010
モーターの制御や表示の操作用です。M5 Core S3でも良いのですが、使い方に慣れていないので、とりあえずシンプルなやつを使用。
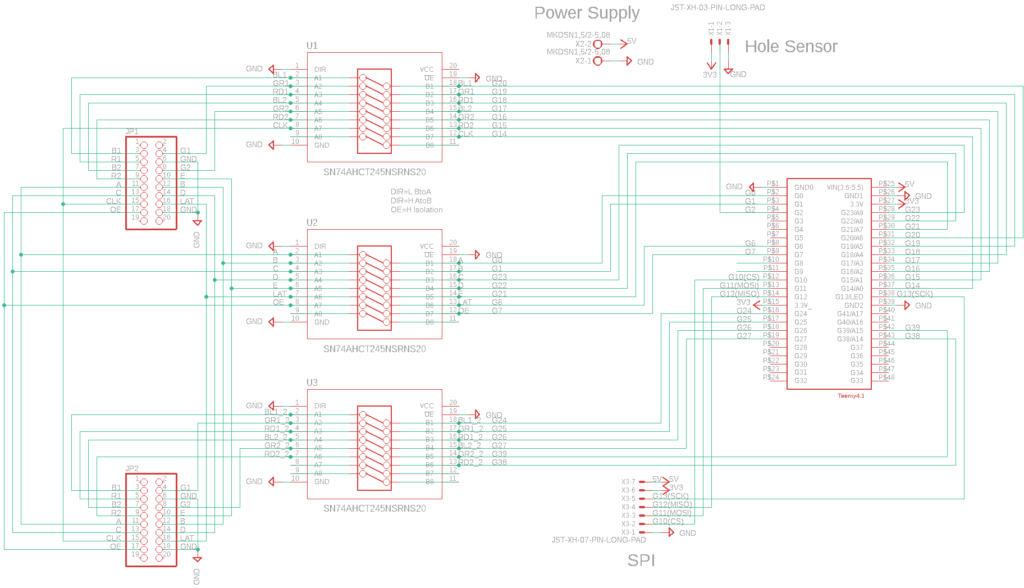
基板制作
Teensy4.1とLEDマトリクスディスプレイをつなぐ基板です。Teensy4.1は3.3V駆動、LEDディスプレイは5V駆動のため、レベルシフタICを入れていますが、どうやらLEDディスプレイは3.3V信号でも問題なく動くようなので、不要でした。また、非回転部分から、回転するTeensy4.1への通信はSPIを想定していましたが、スリップリングは4線しかないのでI2Cにするべきでした。
ハード構成
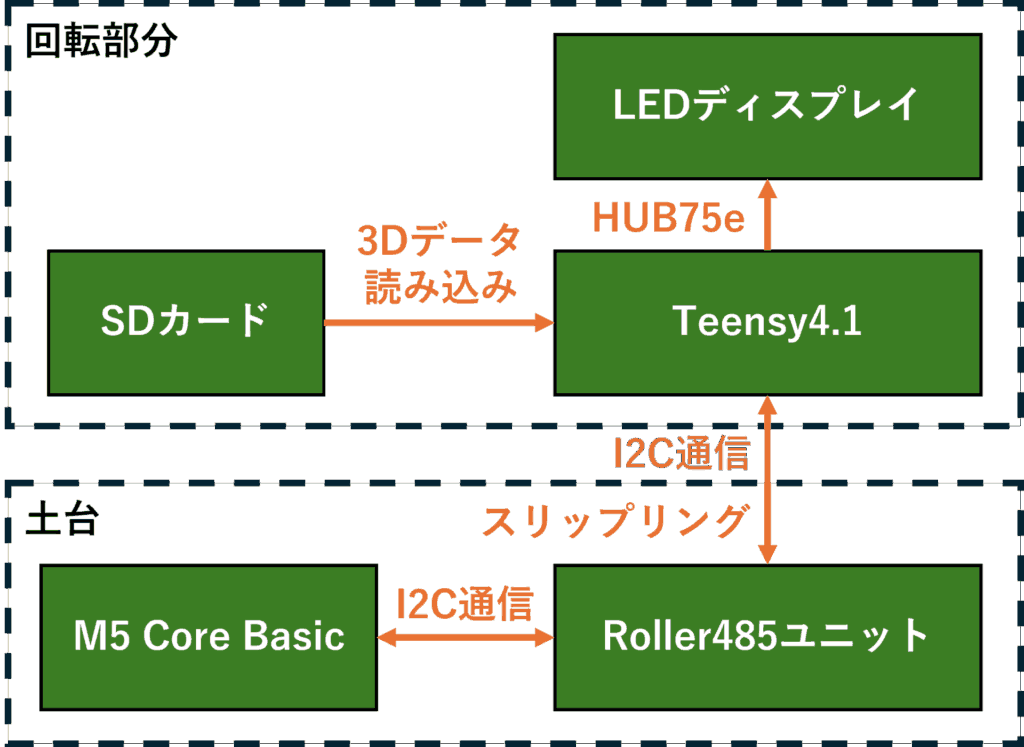
・Teensy4.1:3Dデイスプレイの中核です。SDカードからの3Dデータの読み込み、回転数に応じたLEDディスプレイの表示の制御を行います。回転数の検出はホールセンサで回転の始点を検出し、1周の時間を計測することで行っています。SDカードスロットはTeensy4.1に内蔵されています。
Roller485ユニット:LEDディスプレイとTeensy4.1を回転します。高めの入力電圧にすることでトルクが上がり、ギア無しの直結が可能となっています。
M5 Core Basic:Roller485の制御と表示する画像の選択用です。画像の表示に関してはTeensy4.1で完結している(回転さえすればTeensy4.1は単独で3D映像を表示できる)ため、UI側を担当している形です。
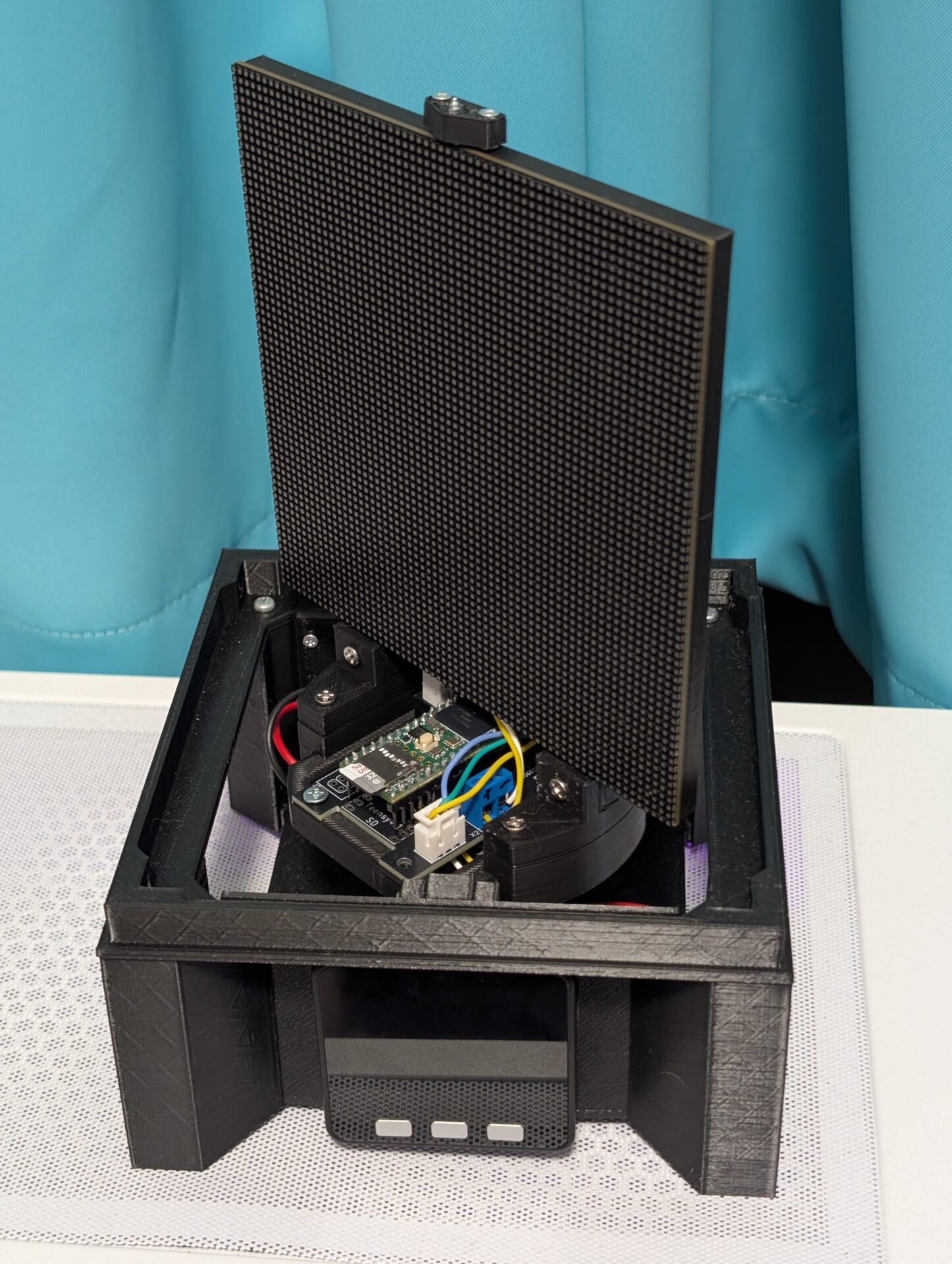
外観
次回
今回で3Dディスプレイを作るハード側の構成が固まりました。次回はソフト編となります。


コメント