
無線通信もできてダブルコアのマイコンであるESP32を使って円形(扇風機型)POV(バーサライタ)を作った記事です。
記事の構成は全4回を予定していて、
①ハード編
②内蔵フラッシュメモリを使った画像表示編
③SDカードを使った画像表示編
④SDカードとマルチコアを使った動画表示編
となります。
最終的にはSDカードに入れた動画(連番Bitmap画像)をPOVで再生することを目指します。
部品
POVに使う部品それぞれの詳細についてはコチラ↓

・ESP32マイコンボード
今回は実験的にSPIを2系統使うため、ESP32+変換ボードを使用していますが、SPIが一つしか使えないやつでも問題ないはずです。(ただしその場合はLEDへの信号送付方法を変える必要あり)
・ESP32書き込みツール
ESP32への書き込みはちょっとややこしいので、スイッチサイエンスで販売している「ESP32-DOWNLOADER」を使用しています。直接USBから書き込めるものでは不要です。
・マイコン内蔵LEDアレイ(テープ)
DataとClockの2信号で通信できるタイプのLEDチップが並んだものを使います。今回使うのは自作基板にHD107Sという2mmLEDを実装したものになりますが、市販のAPA102C (5mm)というLEDが並んだテープ式のがあるためこちらの方がお手軽です。
・スリップリング
中空タイプが便利です。今回は6線式のものを使用していますが、4線式(5V、GND、LEDクロック、LEDデータ)で十分です。
・ホールセンサ
磁力を検出するセンサで、回転の起点を計測するために使います。今回は秋月電子で購入した「SK8552G」を使用しています。(代わりにフォトリフレクタを使用しても良いです。)
・モーター
理想はトルクがあり、回転数がまあまあ出る(負荷ありで1200rpm以上)モーターなのですが、何でも良いです。今回は秋月電子で購入した「RE-280RA-2865」を使用しましたが、ややトルク不足です。
・SDカードスロット
秋月電子で購入した「マイクロSDカードスロットDIP化キット」を使用しています。
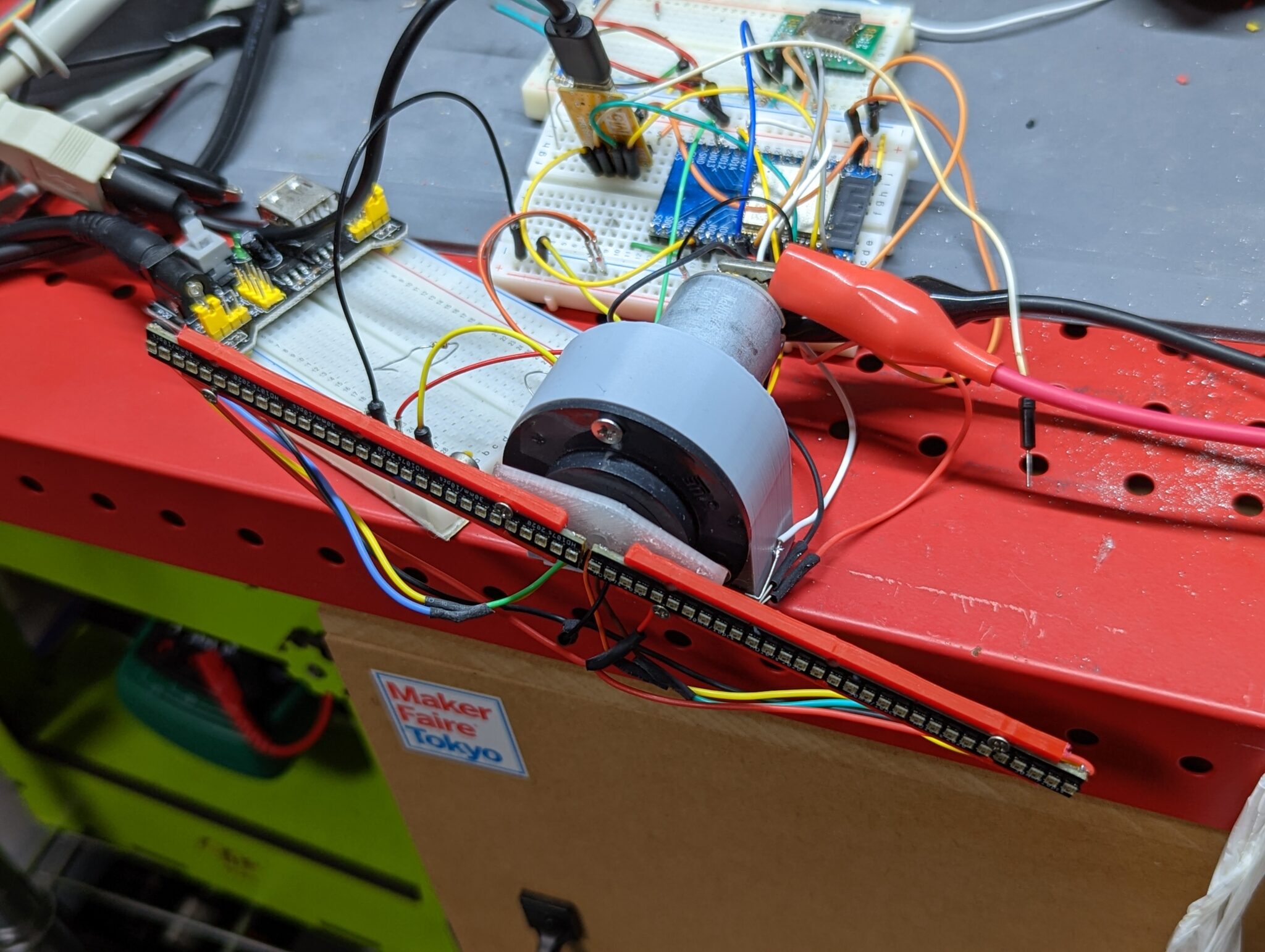
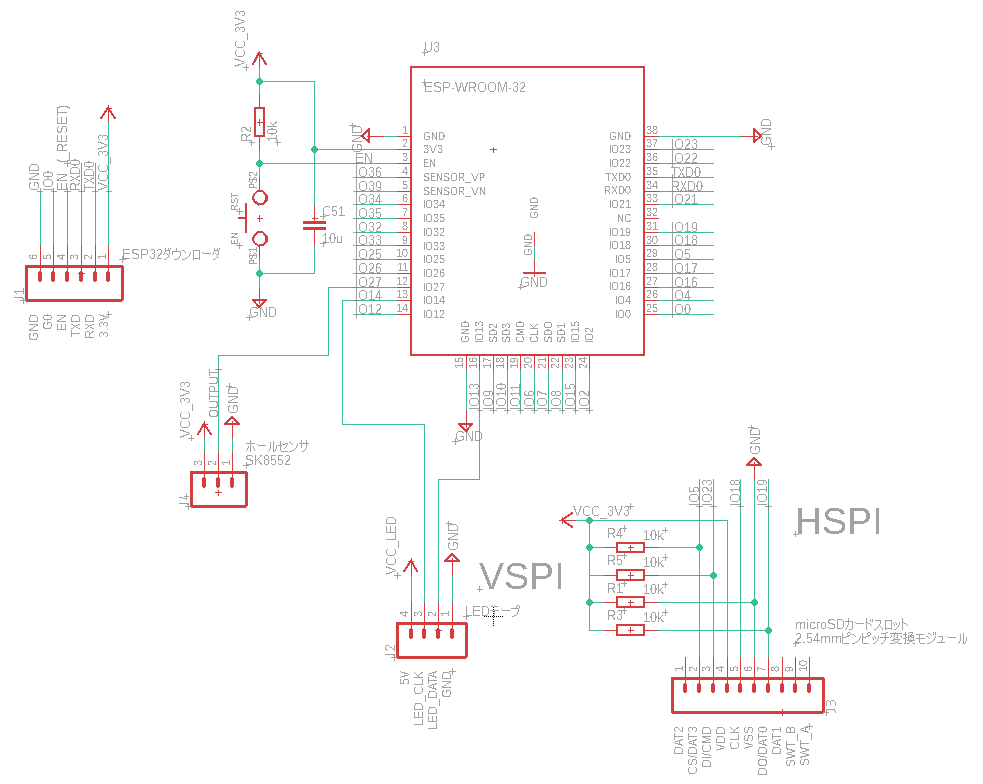
配線
配線図を下に載せます(クリックで拡大)、実際にブレッドボード上に配線した写真はゴチャゴチャしているので…
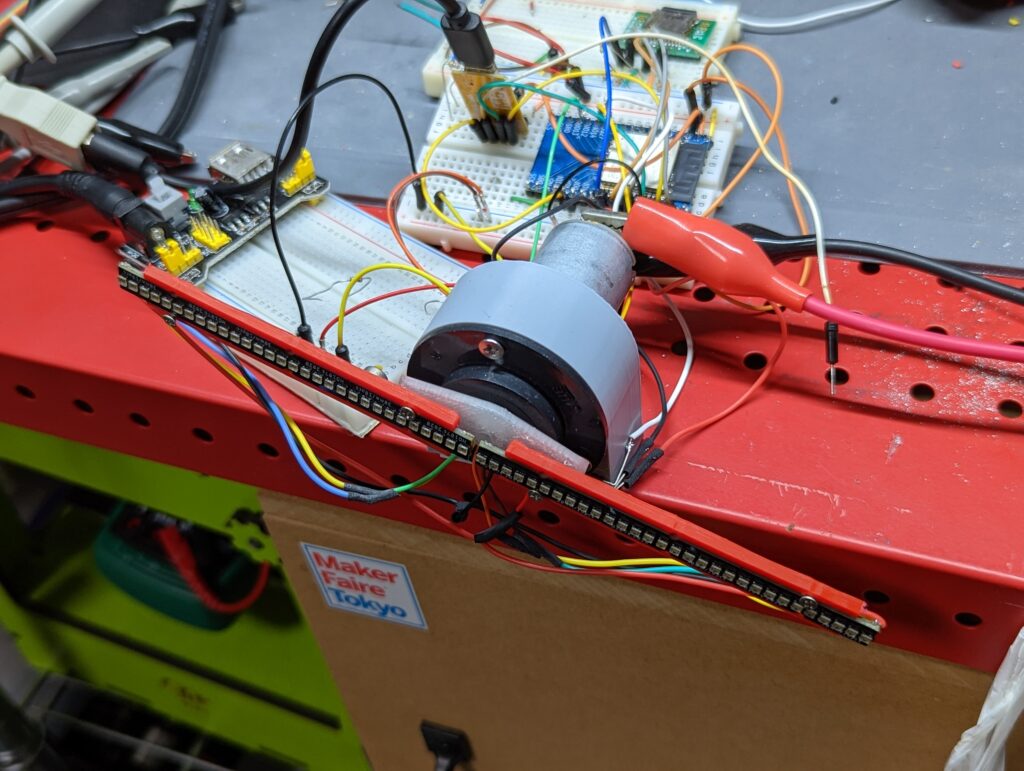
モーターは別電源で回しているのと、LEDはマイコンとGNDだけ共通で別に5V電源を供給しています。
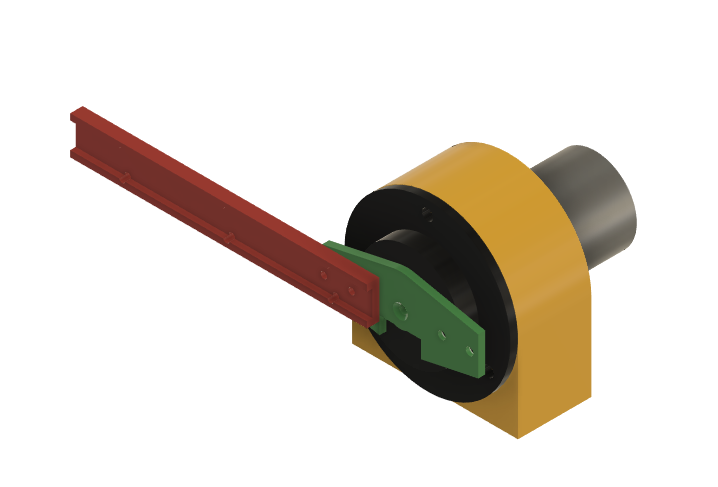
3Dプリント部品とホールセンサ
3Dプリントする部品は、「スリップリングとモーターの固定(黄色)」「モーターの回転軸のホールド(緑色)」「LEDアレイの固定(赤色)」の3つです。モーターの回転を滑らずに伝えるのは3Dプリントだと中々難しいので、接着剤を塗っています。ホールセンサの位置はプログラムで調整できるのでどこでも良いです。回転部のネオジム磁石が通過する位置に配置します。

次回
これでプログラムを書いて、モーターを回せばPOVとしての映像が表示できる状態になりました。画像の変換方法とESP32へのプログラムは「内蔵フラッシュメモリを使った画像表示編」に続く。


コメント
コメント失礼します。いつも楽しく拝見させていただいております。
質問なのですが、
シャフトエンドのスリップリングの場合はどういう配置が考えられるのでしょうか?
コメントありがとうございます!
中空でないスリップリングということですよね?
その場合、小型のものであればスリップリングの軸を回転軸にして、その軸にプーリーをつけてゴムベルトやタイミングベルトで回しますね。モーターはスリップリングの真横に配置する形です。
大型のものでスリップリングの軸に負担がかかるのが不安な場合、スリップリングを軸の中心、モーターをスリップリングの真横に配置するのは変わらないのですが、スリップリングの先にベアリングを配置します。
・固定側:ベアリングの外側、スリップリングの固定部、モーター
・回転側:ベアリングの内側、スリップリングの回転部、LED、プーリー