
回転立体ディスプレイ(のUnityで3Dデータを作るところ)がちょっと行き詰っているので、息抜きで久しぶりにプロッター(字や絵を書く機械)を作ろうと思います。
行き詰っているの↓

回転式立体ディスプレイを作ろう①
今まで球体ディスプレイなど、いわゆる"2.5D"ディスプレイを作ってきたわけですが、やっと真の3次元ディスプレイ(Volumetric Display)を作れる公算ができました。今回は本当に立体に見えるかの検証になります。こういうの作りたい...
prototype09.com
2024.12.28

回転立体ディスプレイを作ろう②
前回前回はLEDマトリクスディスプレイを回転させて立方体を表示しましたが、今回はハードウェアをより改善していこうと思います。使用部品・Teensy4.1マイコン高性能CPU・高速IO操作・高速SDカード読み書きができるマイコンです。・Rol...
prototype09.com
2025.10.14
要件
- 2つのステッピングモータが連動してX・Y軸を駆動する
- 高速描画
- マルチカラー
- ペン交換可能
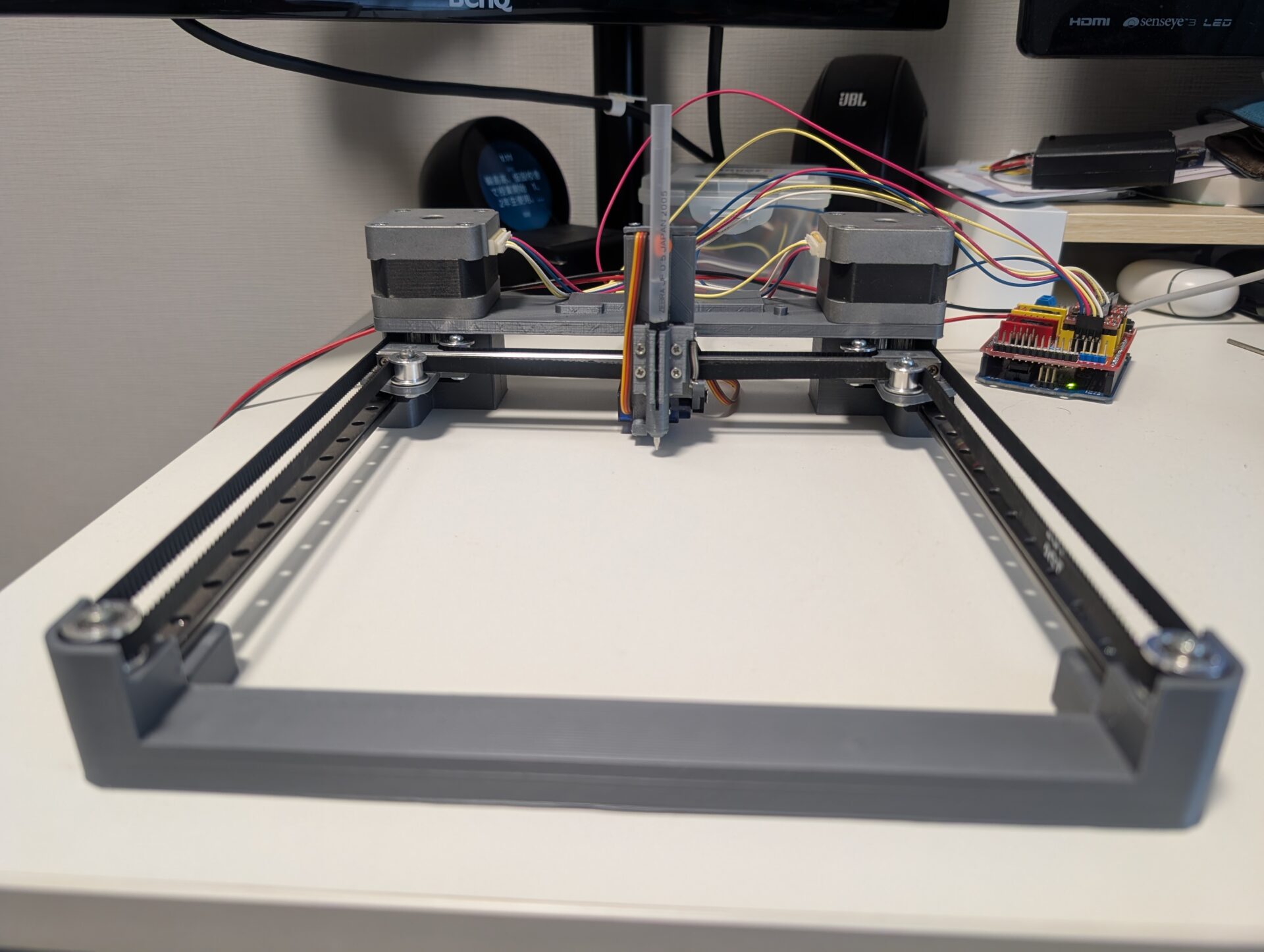
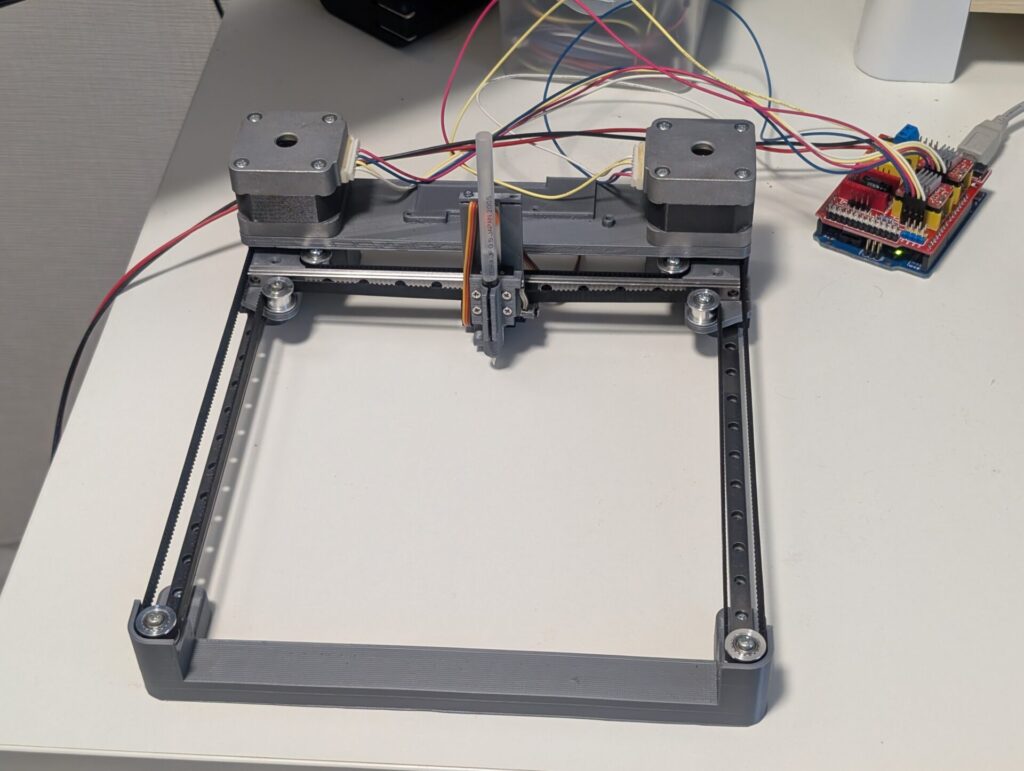
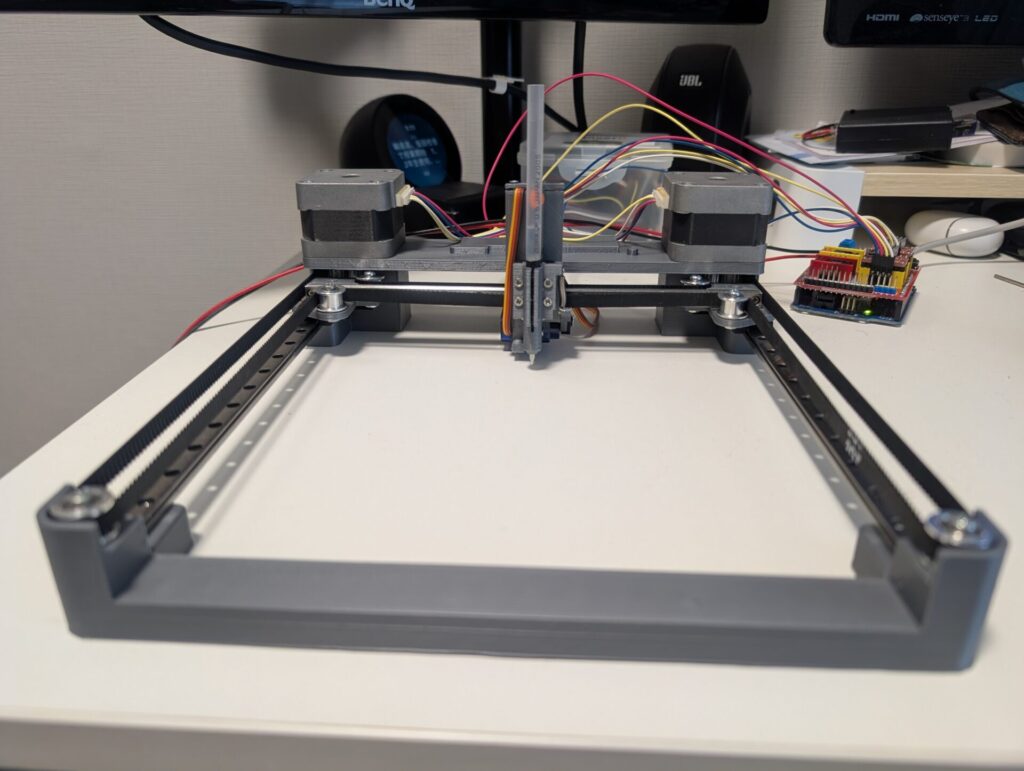
とりあえず作ったもの
とりあえず、X・Y駆動部をメインに動作確認で作ったもの
ステッピングモーター二つを連動してXYレールを駆動するH-botという機構
制御はArduino Uno+Grbl基板
H-bot機構の動作と問題点
作ってみてから気づいたものの、H-bot機構には致命的な欠点があり、「X軸(横軸)レール移動の時に、(剛性がしっかりしていないと)軸がブレやすい」ということです。前後移動時には左右両側のベルトで引っ張っているのに対し。左右移動時にはベルトは手前側しか引っ張っておらず、そのため力のかかり方が不均衡になってしまいます。
↓実際の動作と解説動画
H-bot機構に代わるCoreXY機構
H-bot機構の問題点を解決する方法としてCoreXY機構の採用があります。これは「ベルトが2つになる」「構造がやや複雑」という短所があるものの、前後左右の移動が安定します。
↓わかりやすかった比較動画
せっかく作ったH-bot機構のプロッターですが、CoreXYに改造していこうと思います。


コメント